An industry–academia–research–government platform centered around KAIST researchers from various fields to lead advanced research in future mobility. Through the consortium, develop an open integrated system that connects vehicles, infrastructure, and services, and control and operate each function through software.
The project website can be found here.
Deep Mobility Consortium
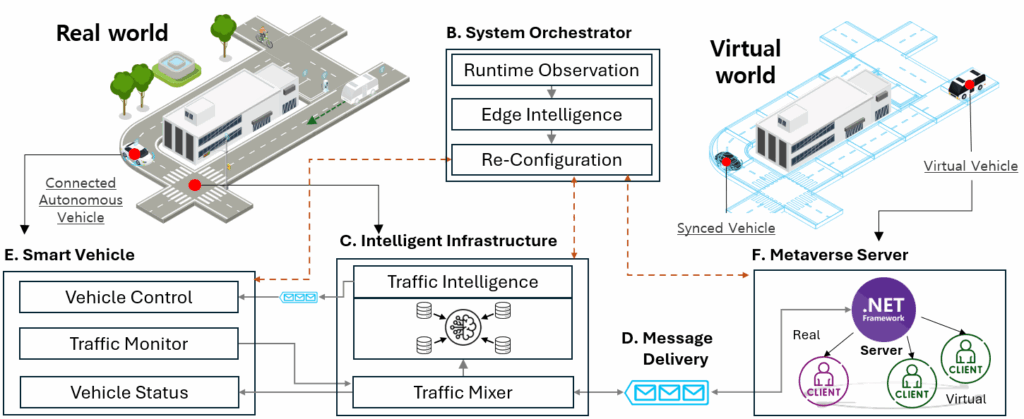
Software-Defined Mobility Framework – Mobility Operating System (mOS)
Project Details
Subject
Innovative Mobility and Planning for Advanced Connectivity and Traffic safety
Funded by
PARTRON, Penta Systems Technology Inc., MQNIC, HL Klemove Corporation, & Hyundai NGV Tech Co., Ltd.
Period: